In the wake of a powerful earthquake, unmanned aerial vehicles (UAVs) could navigate through collapsed structures to map the area, providing crucial data for rescuers to reach survivors swiftly. However, this poses a significant challenge for autonomous robots, which must quickly alter their paths to avoid unexpected obstacles while maintaining their route. Researchers from MIT and the University of Pennsylvania have devised a new trajectory-planning system that addresses both issues simultaneously.
Their approach allows a UAV to react to obstacles within milliseconds while maintaining a smooth trajectory that reduces travel time. The system employs a novel mathematical formulation that ensures safe travel along a viable path and is less computationally demanding than current techniques, resulting in smoother and faster trajectory calculations. The planner operates efficiently in real-time using only the UAV’s onboard computer and sensors.
Called MIGHTY, this open-source system eliminates the need for expensive proprietary software, making it more accessible for diverse real-world applications. Besides search-and-rescue operations, MIGHTY could be used for last-mile delivery in urban areas or for inspecting complex industrial structures like wind turbines.
“MIGHTY achieves comparable or better performance using only open-source tools, which means any researcher, student, or company — anywhere in the world — can use it freely. By removing this cost barrier, MIGHTY helps democratize high-performance trajectory planning and opens the door for a much broader community to build on this work,” says Kota Kondo, a graduate student in aeronautics and astronautics and the lead author of a paper on this system.
Kondo is joined by Yuwei Wu from the University of Pennsylvania, UPenn professor Vijay Kumar, and Jonathan P. How, a Ford professor at MIT. Their research appears in IEEE Robotics and Automation Letters.
The Fukushima Daiichi nuclear accident during the Great East Japan Earthquake influenced Kondo’s interest in developing autonomous robots capable of entering hazardous environments. The necessity for a robust trajectory planner, which determines the safest path for a robot, became evident. Existing systems often require trade-offs, with commercial options being expensive and open-source alternatives lacking in performance or usability.
MIGHTY, developed by Kondo and his team, produces high-quality, smooth paths and responds to real-time obstacles, operating rapidly with onboard components. They overcame a major limitation of open-source systems, which typically estimate travel time first and then determine the best path. A fixed travel time can force the UAV to increase speed to avoid obstacles, making navigation difficult.
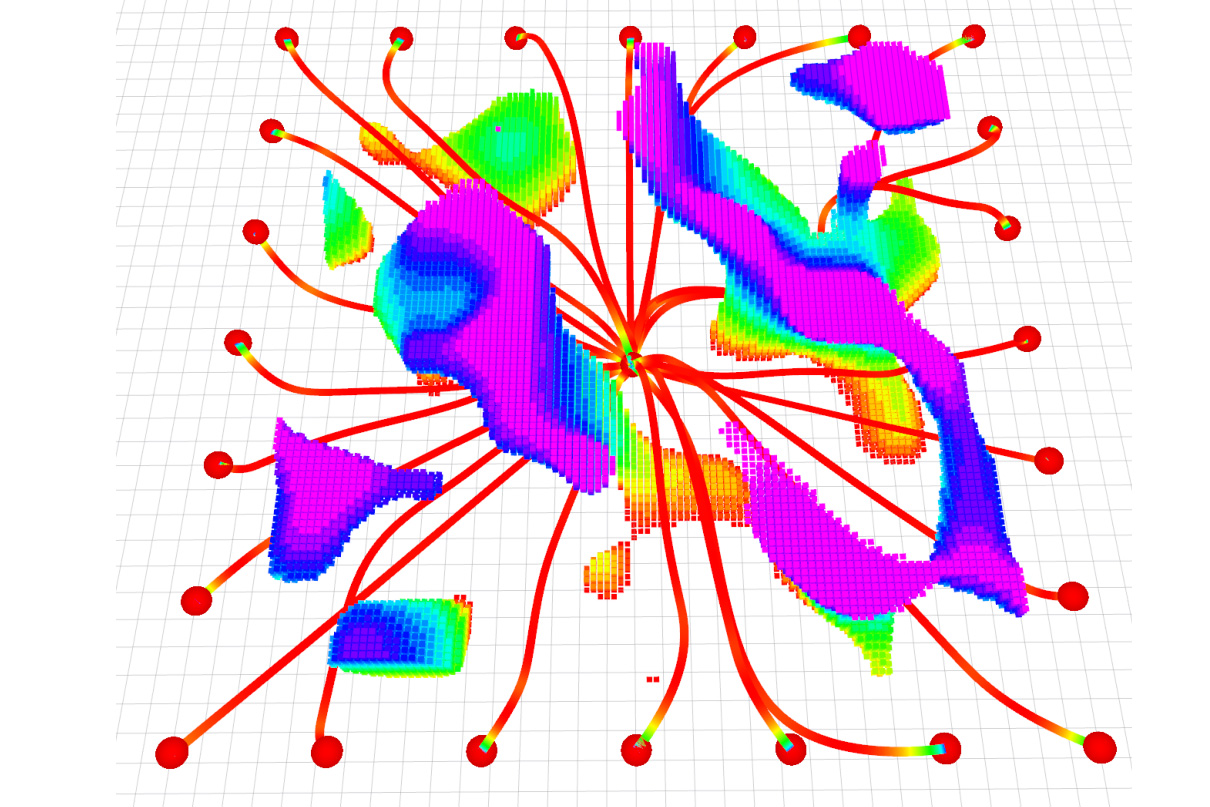
Instead, MIGHTY uses Hermite splines to optimize travel time and path simultaneously in one step, resulting in smooth, controllable trajectories. Although this optimization is more complex, the researchers minimized computational demands by starting with an initial trajectory guess and refining it using the UAV’s lidar-generated map.
This method enables real-time reaction to unforeseen obstacles while maintaining smooth paths and short travel times. MIGHTY relies solely on the UAV’s onboard components, crucial for missions far from base stations. In simulations, MIGHTY required only about 90% of the computation time of advanced methods and reached destinations 15% quicker. Real-world tests showed it traveling at 6.7 meters per second while avoiding all obstacles.
“With MIGHTY, everything is integrated in one piece. It doesn’t need to talk to any other piece of software to get a solution. This helps us be even faster than some of the commercial solvers,” Kondo explains. Looking ahead, the team aims to improve MIGHTY for controlling multiple robots and conducting more challenging flight tests, enhancing the open-source system based on user input.
“MIGHTY makes an important contribution to agile robot navigation by revisiting the trajectory representation itself. Hermite splines have already been successfully used in visual simultaneous localization and mapping, and it is nice to see their advantages now being exploited for trajectory planning in mobile robots. By enabling joint optimization of path geometry, timing, velocity, and acceleration while retaining local control of the trajectory, MIGHTY gives robots more freedom to compute fast, dynamically feasible motions in cluttered environments,” says Davide Scaramuzza, a professor at the University of Zurich, who was not involved in the research.
Original Source: news.mit.edu